Статьи / KA046 /
Laurent-5 / 5G: Основы программируемой логики CAT. Часть 1
§ 46. Laurent-5 / 5G: Основы программируемой логики CAT. Часть 1
|
|
Дмитрий Иванов, 18 Сентября 2020
|
Рассмотрим решение следующей практической задачи:
Необходимо что бы модуль Laurent-5 / 5G самостоятельно (автономно) переключал электромагнитное реле RELE_1
каждые 15 минут из состояния OFF в состояние ON и обратно (чередовал состояние). Привязка по времени - с момента старта модуля.
Задачу будет проще всего решить через систему CAT – редактируемых логических правил (программируемая логика).
Заходим через WEB интерфейс модуля Laurent-5 или
Laurent-5G в соответствующий раздел выделенный для системы CAT:

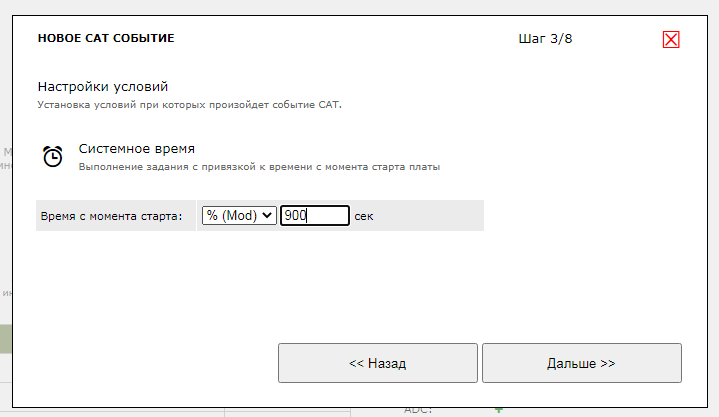
Создаем новое правило по времени с момента старта платы (тип события ‘N’ – системное время):

Настраиваем событие так, что бы оно происходило каждые 15 минут (системное время по модулю 900 сек равно нулю):
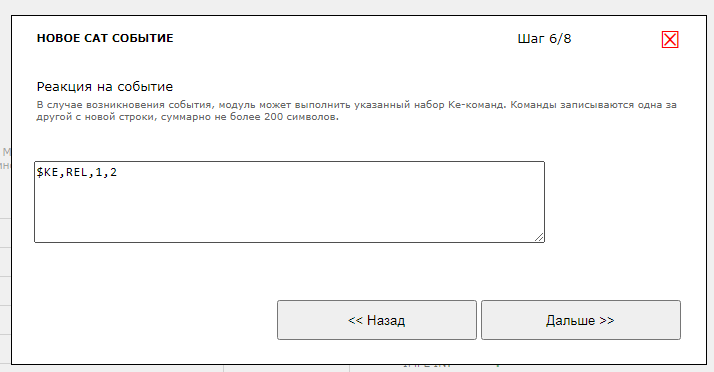
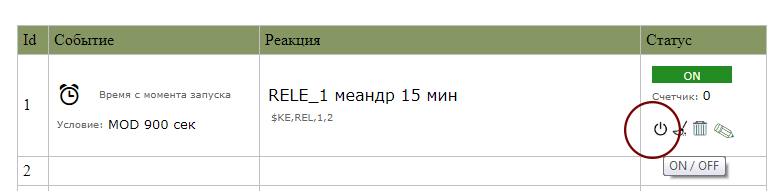
В качестве реакции на событие в виде Ke-команд зададим список действий, которые нужно будет выполнять, а именно,
1-ое реле будет менять свое состояние на противоположенное (если включено – будет выключено и наоборот).
Для этого следует использовать Ke-команду:
$KE,REL,1,2
Параметр '1' определяет номер реле, '2' - тип действия.
В данном случае - инверсия состояния реле (0 - выключить, 1 - включить, 2 - инверсия или переключение).
См. описание команды $KE,REL в документе
Описание Ke-команд управления
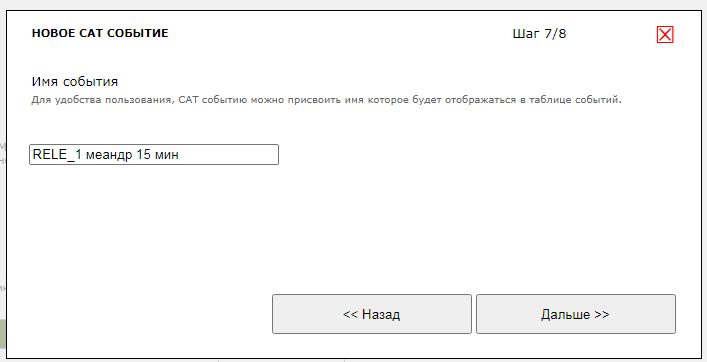
Для собственного удобства, присвоим логическому правилу произвольное имя:
Событие создано, закрываем информационное окно.
Теперь осталось только включить вновь созданное событие (кнопка ON/OFF в разделе СТАТУС)
и теперь каждые 15 минут реле RELE_1 будет переключать свое состояние в противоположенное.
Эти операции будут производится модулем самостоятельно, без внешнего управления.
В случае прерывания питания система CAT продолжит свою работу т.к. все события сохраняются в энергонезависимой памяти.
© Дмитрий Иванов
18 Сентября 2020 года
http://www.kernelchip.ru
